Biblioteka nRF2401 dla BASCOM-a
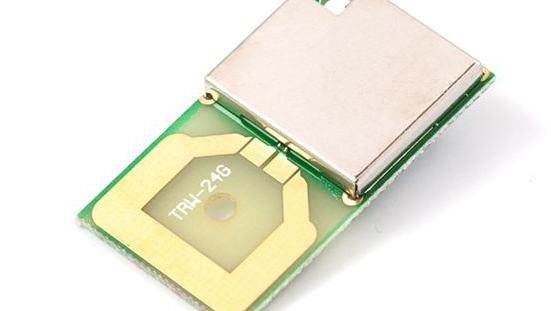
Stworzyłem podstawową bibliotekę do obsługi nRF2401 z poziomu AVR przez BASCOM-AVR. Testowana na platformie ModuBra!nz, działa stabilnie.
Stworzyłem podstawową bibliotekę do obsługi nRF2401 z poziomu AVR przez BASCOM-AVR. Testowana na platformie ModuBra!nz, działa stabilnie.
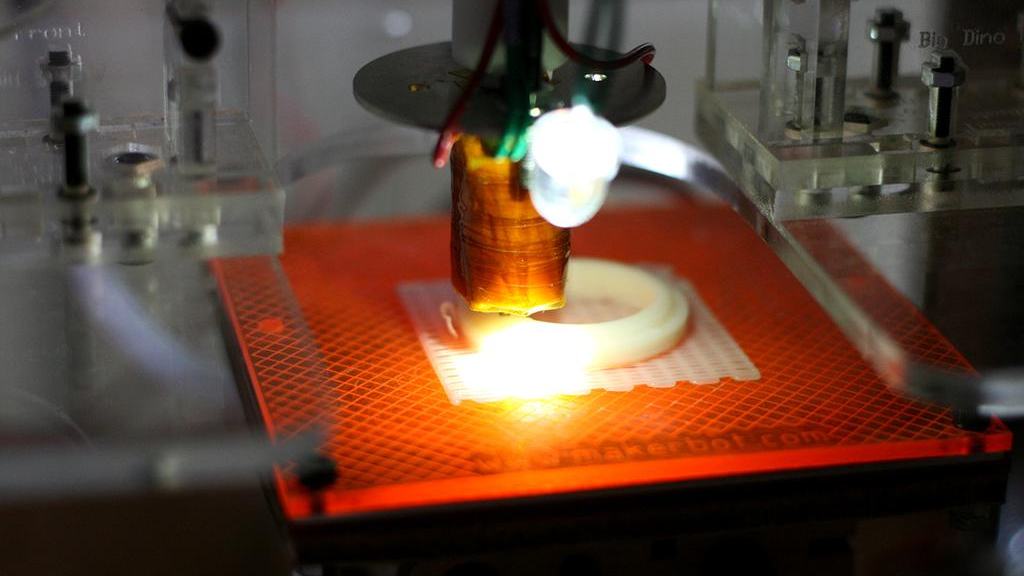
Drukowanie tego pojedyńczego koła trwało 90 minut. Jednak kolo ma dopasowane wszystkie detale których wycinanie ręczne napewno zajeło by więcej czasu :) //
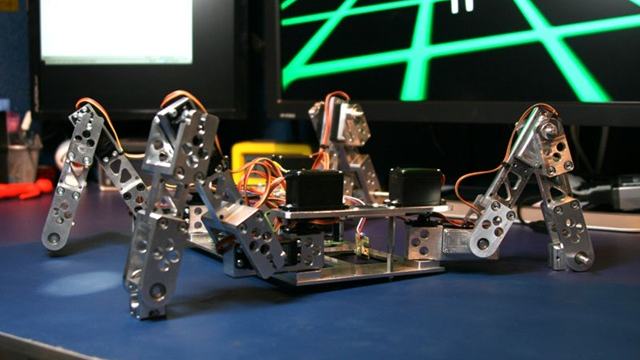
Oto najnowszy i chyba najbardziej karkołomny projekt jakiego się do tej pory podjąłem. Robot który może chodzić nie jest niczym niezwykłym, powstało wiele takich projektów jednak mają one wspólny problem, energetycznie nie są optymalne. Aby

Nasz wall-e jest narazie jeszcze bardzo głupiutki ale ma przed sobą interesującą przyszłość. Jest to pierwsza taka konstrukcja w moim wykonaniu, zdecydowanie wole koła ;) Jednak co ciekawe ten układ jezdny jet bardzo prosty w wykonaniu, sil

Kolejne maleństwo utylizujące wspaniale miniaturowe silniczki.

Mój najdłuższy projekt, Dominant jest masywnym, ponad 10Kg, robotem wyposażonym w manipulator o udźwigu ponad 1Kg.

Długa droga którą przebył CuBot zaczęła się właśnie od tego projektu. Projekt inż. miał być prosty i przyjemny w wykonaniu. Nic bardziej mylnego. Dostaliśmy z kolega podwozie od czołgu z kompletna mechanika. Niestety w ramach szeroko pojete

Oto mój projekt robota na obronę inżynierską. Założeniem pracy było stworzenie robota o wyglądzie zbliżonym do tych oferowanych przez firmy specjalistyczne jednak w cenie ok 400zł. Ilość elementów do wykonana takiego robota nie jest powalaj

Po tankPaq'u przyszła kolej na miniPioniera. Ten robot był już zbudowany na planie trójkąta, dwa koła jezdne niezależne pozwalały skręcać, kręcić się i jeździć po łuku, trzecie pozwalało utrzymywać równowagę całej konstrukcji (tak naprawdę
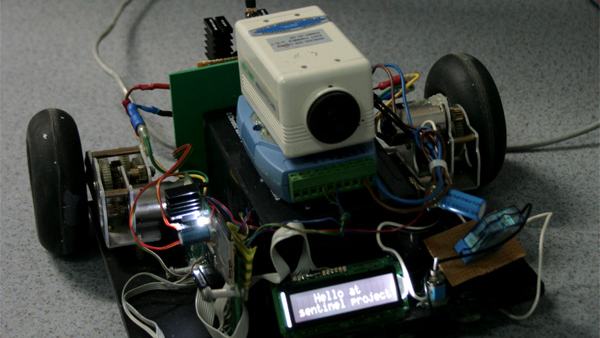
Ten robot powstał jako rozwiniecie miniPioniera i chęci stworzenia czegoś na potrzeby szkolnej robotyki z mobilna kamera. Oczywiście po prezentacji Pathfinder'a było to całkiem wskazane. Poza tym w pracowni leży sporo nieużywanych modemów r

Ponieważ roboty tutaj prezentowane są najczęściej mobilnymi platformami brakuje im tego co ogląda się często na filmach lub różnych spotach reklamowych gdzie robot może podjąć jakąś internakcję z otoczeniem nie tylko "popychać" obiekt. Komu
Pathfinder - wzorowany na marsjańskim roverze robot o holonomicznym układzie jezdnym. Robot posiada napęd na 4 koła, zastosowano silniki 6V z wbudowaną redukcja. Dodatkowo w czerwonym robocie testuje enkoder :) O konstrukcji Dość oczywistą