
DWG drukarka 3D — druga walka
Po pierwszej wersji okazało się, że linka SPECTRA i rozmiar drukarki nie pozwalają na wymaganą precyzję przy odpowiedniej prędkości.
Po pierwszej wersji okazało się, że linka SPECTRA i rozmiar drukarki nie pozwalają na wymaganą precyzję przy odpowiedniej prędkości.

Ponieważ w moim warsztacie miejsca jest coraz mniej - zwłaszcza od kiedy postanowiłem zbudować frezarkę - staram się przestrzeń wykorzystywać kreatywnie. W związku z powyższym pojawił się pomysł wymiany stolika od tokarki na przesówany stół
Jeżeli chcesz uruchomić Waveshare LCD bez ich własnego obrazu — spróbuj tego. Mój ruszył na czystym raspbianie z dtoverlay i bez żadnych dziwnych hacków.
Trafiłem na świetną budowę autorstwa RichRapa i postanowiłem zbudować drukarkę 3D opisaną w jego poście na youmagine.

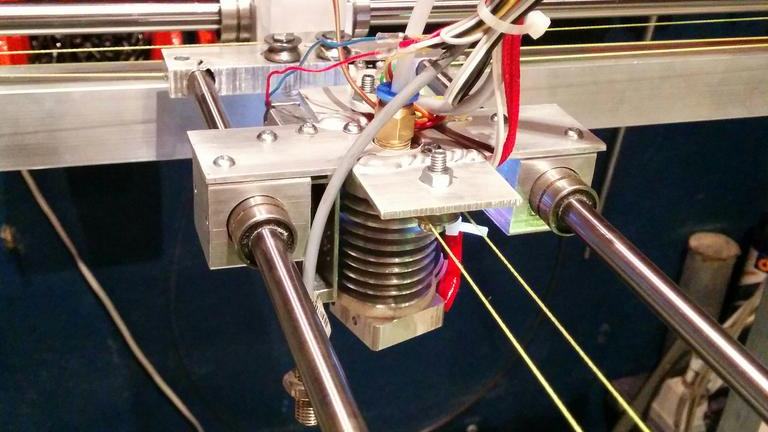
Fotorelacja z budowy mojego ekstrudera od podstaw — z wyjątkiem ceramicznego wkładu grzewczego i wkładki ze stali nierdzewnej.

Po przeczytaniu sporej liczby for o CNC i DIY dorosłem do budowy własnej frezarki. Pole robocze X: 50cm, Y: 50cm, Z: 45cm.

Frezarka CNC z epoksydowa brama powoli nabiera kształtu nowe wyposarzenie pracownii :) Frezarka będzie miała pole robocze X: 50cm Y: 50cm Z: 45cm Wrzeciono to "mokry chińczyk" 2.2KW z mocowaniem ER20Napęd servo P3 Sanyo Denki 750W SGDM-08 Y

raspberry pi sprawdza się bardzo dobrze jako kontroler do KNX oprogramowany np. w Python'ie. Do pracy wymagany jest działający gdzieś w sieci EIBD. Ponieważ raspberry nadaje się doskonale żeby uruchomićna nim ten deamon proponuje przejść pr

Po kupnie nc6400 byłem rozczarowany kartą b/g. Jeszcze gorzej zrobiło mi się, gdy odkryłem, że HP stosuje sprzętową whitelistę kart.
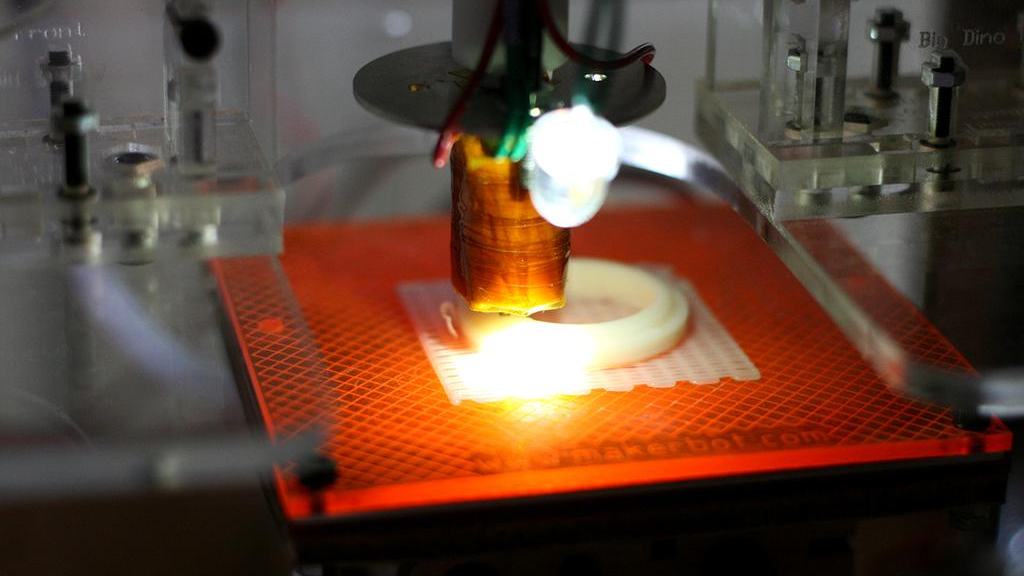
Drukowanie kół to dość typowy temat wśród użytkowników Cupcake i klonów RepRap. Ten film pokazuje cały proces, od drukowania raftu do gotowego koła.
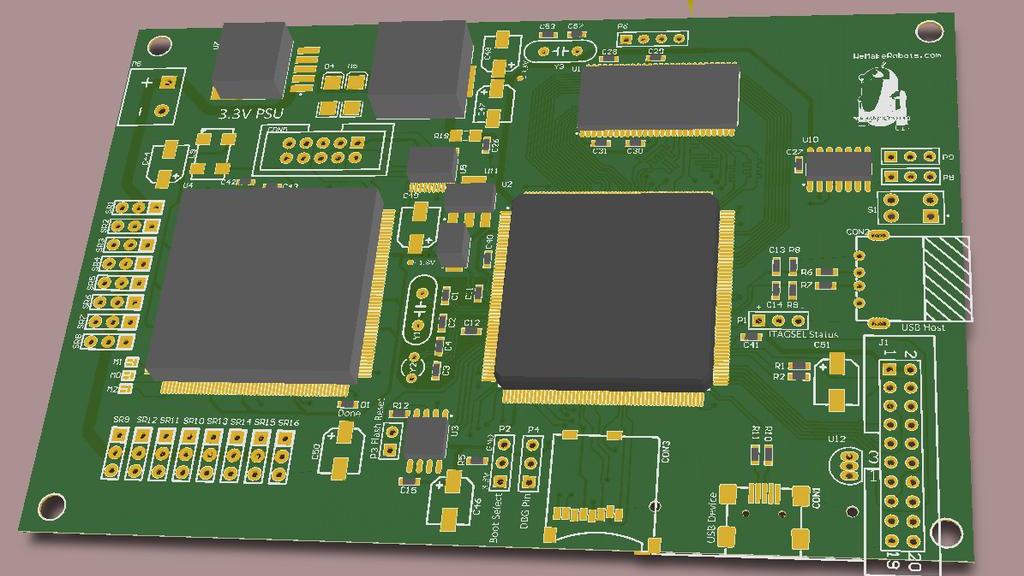
Jeden z moich nowszych projektów, którego dokończenie zajmuje więcej czasu niż powinno. Brakuje jeszcze połączenia ARM z FPGA.
Jeżeli kiedyś słyszałeś o kołach Mecanum, wiesz jak są niesamowite. Niestety kupić je jest praktycznie niemożliwie.
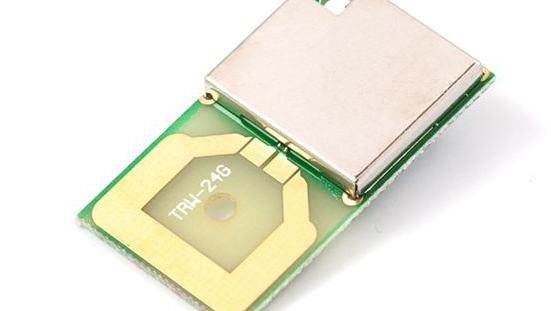
Stworzyłem podstawową bibliotekę do obsługi nRF2401 z poziomu AVR przez BASCOM-AVR. Testowana na platformie ModuBra!nz, działa stabilnie.
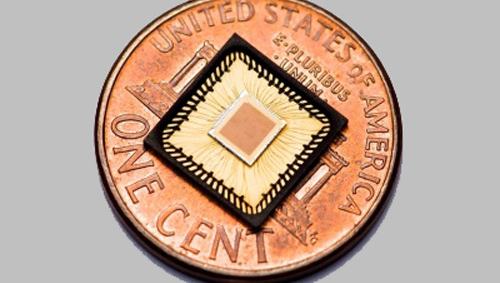
Wierzę że to mocno zmieni elektronikę. http://dev.emcelettronica.com/probability-processor-arrived
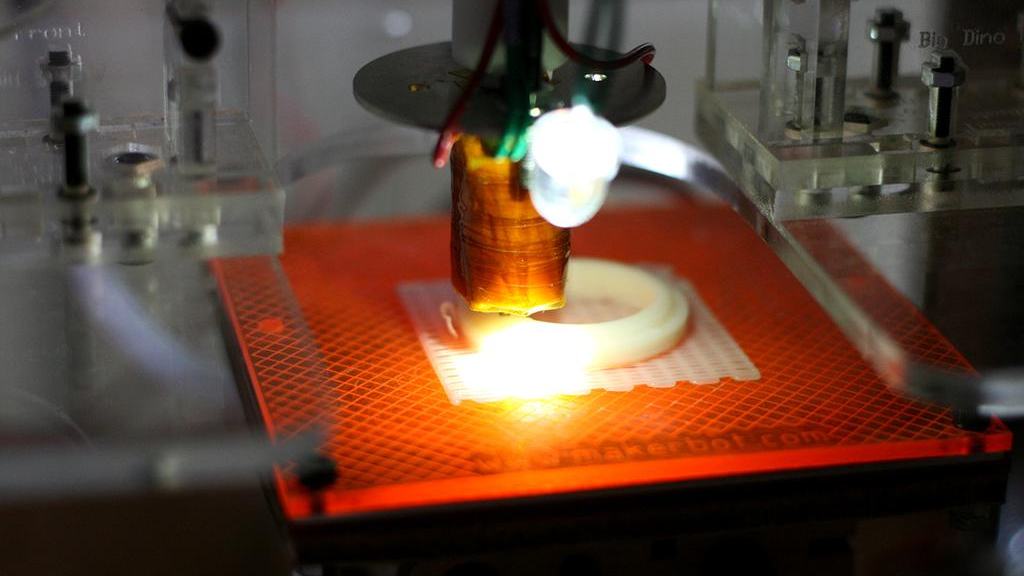
Drukowanie tego pojedyńczego koła trwało 90 minut. Jednak kolo ma dopasowane wszystkie detale których wycinanie ręczne napewno zajeło by więcej czasu :) //
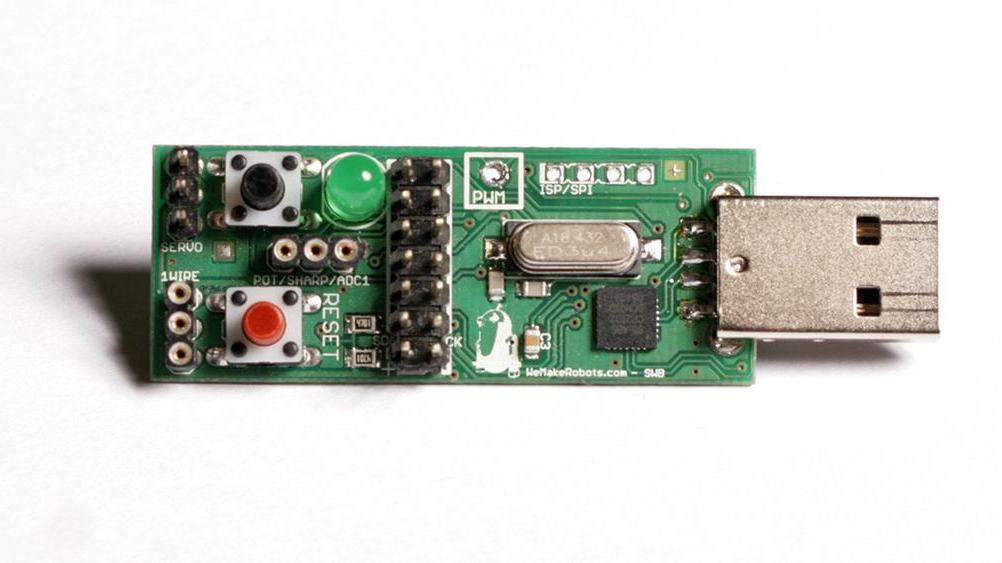
Projekt swbStick powstał jako dopełnienie przedmiotu SWB (SWTC) który zastąpił przedmiot TEC. Celem SWB jest zapoznanie studentów z rzeczywistymi, aktualnie stosowanymi rozwiązaniami. Postawiliśmy na wiedzę praktyczną a nie teorię. Urządzen

Aby dalej rozbudowywać platformę swbStick spróbowałem zabawy z Arduino. Udało mi się przenieść bootloader na ATmega32 z 18.432MHz i zbudować definicje projektów (Skechbook) dla Arduino.
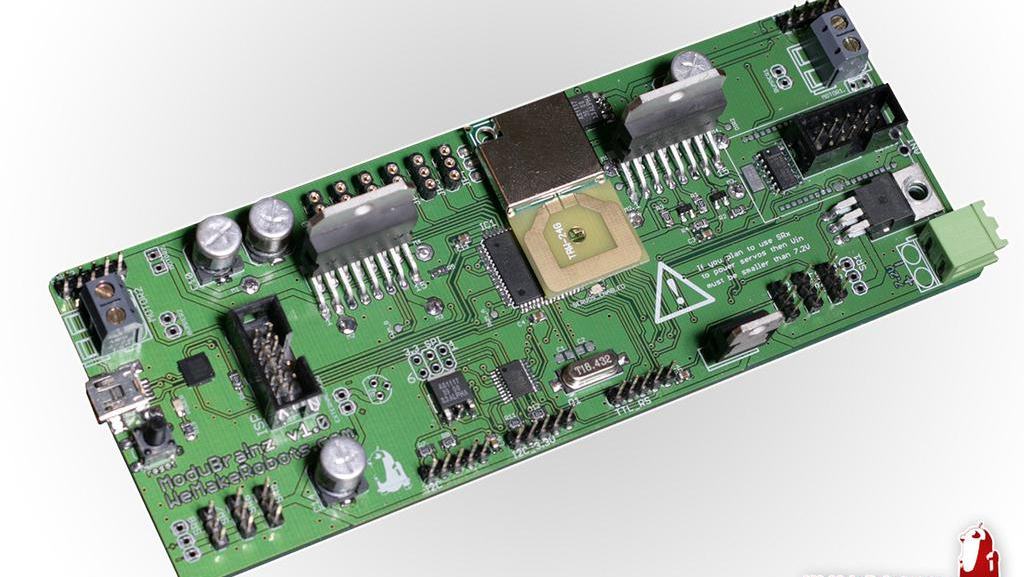
Tym razem pracuje nad najbardziej zwartą konstrukcją z założenia opracowywana pod NokiBot. Sterownik ma interfejsy: I2C zarówno TTL jak i i 3.3V SPI 3.3V złącze pod transciver Nordic nRF2401 RF-24G (razem z biblioteką dla BASCOM) modułowy p
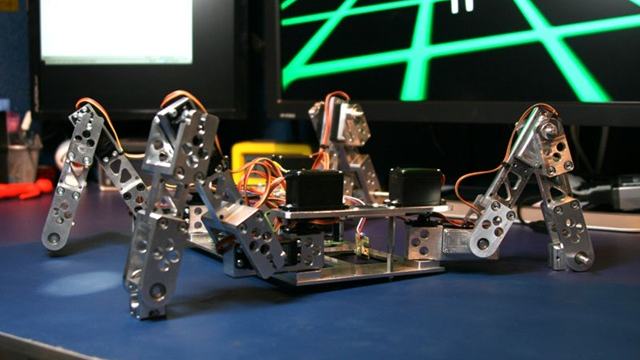
Oto najnowszy i chyba najbardziej karkołomny projekt jakiego się do tej pory podjąłem. Robot który może chodzić nie jest niczym niezwykłym, powstało wiele takich projektów jednak mają one wspólny problem, energetycznie nie są optymalne. Aby

Katedra Robotyki i Systemów Wieloagentowych PJWSTK kupiła 10 odkurzaczy Roomba firmy iRobot. Nareszcie zrobiło się czysto w Laboratorium. Zaletą robotycznych odkurzaczy Roomba jest udostępnione API do ich programowania, dzięki czemu powstał